휴머노이드 로봇 기술 개발 경쟁의 최전선
글 : 쉬광탄 / 중신젠터우증권 애널리스트 2026-01-16

휴머노이드 로봇은 인공지능(AI)의 활용 사례 중 가장 주목받는 분야 중 하나로, 제조업과 서비스업은 물론 가정, 우주 탐사 등 다양한 영역에서 폭넓게 활용될 수 있다. 현재 테슬라를 비롯해 샤오펑(小鵬), 샤오미(小米) 등 주요 글로벌 기업이 잇따라 이 시장에 진입하고 있다. 업계에서는 이 산업이 본격적인 성숙기에 접어들 경우, 연간 수조 위안 규모의 거대한 시장이 형성될 것으로 내다보고 있다. 이에 따라 관련 산업의 밸류체인 전반에 대한 정밀한 분석이 요구된다.
휴머노이드 로봇의 발전 경로
휴머노이드 로봇이 인간과 유사한 형태를 채택하는 데에는 여러 가지 실질적인 이유가 있다.
첫째, 환경 적응성이다. 계단, 공구 등 대부분의 실제 작업 환경은 인체공학을 기반으로 설계되어 있어 사람과 유사한 구조를 가진 로봇이 이러한 환경을 그대로 활용하기에 유리하다.
둘째, 작업 범용성이다. 인간의 유연한 관절과 감각 체계를 모방하면 로봇의 동작도 유연해져 다양한 작업을 수행할 수 있는 범위가 넓어진다.
셋째, 사회적 수용성이다. 인간과 닮은 외형은 사람과 로봇 간의 상호작용에서 심리적 거부감을 줄여주며 사용자 친화적인 경험을 제공한다.
넷째, 데이터 확보의 용이성이다. 고도로 정밀화된 생체 모사는 인간의 동작을 섬세하게 재현할 수 있어 방대한 운동 데이터를 수집하는 데 유리하다.이는 심층 강화학습과 같은 고난도 AI 훈련 방식에서 학습 시간과 난이도를 효과적으로 조정하는 데 기여한다.
휴머노이드 로봇 연구는 인간의 이족보행을 모방하는 데서 출발했다.1969년 일본 와세다대학교의 가토 이치로 교수는 세계 최초로 이족보행 문제를 해결하며 연구의 기틀을 마련했고, 1973년에는 로봇 팔과 인공 시각·음향 센서를 결합한 자율 로봇 ‘WAROT-1’을 개발하면서 인공지능(AI) 영역으로 확장되기 시작했다.
1990년대 이후에는 보행 능력과 지능, 기능이 고도화되며 혼다의 ‘아시모’(ASIMO)가 대표 사례로 떠올랐고, 2015년에는 ‘페퍼’(Pepper)가 대중 시장 진입을 시도한 첫 상용 휴머노이드 로봇으로 주목받았다.
2021년에는 보스턴다이내믹스가 로봇 ‘아틀라스’(Atlas)의 고난도 파쿠르 동작 영상을 공개해 큰 반향을 일으켰고, 테슬라는 같은 해 ‘옵티머스’(Optimus)의 출시 계획을 발표하며 대량 생산과 상업화 시대를 예고했다. 2025년 CES에서 테슬라 CEO 일론 머스크는 “휴머노이드 로봇이 인류보다 많아질 것”이라며, 2025년 수천 대의 옵티머스를 공장 테스트용으로 생산하고 2026년에는 생산량을 10배 확대할 계획이라고 밝혔다.
중국의 주요 기업들도 휴머노이드 로봇 시장에 속속 진입하고 있다. 샤오펑(小鵬), 샤오미(小米) 등은 이미 개발에 들어갔으며, 2016년에는 유비테크(UBTECH: 優必選)가 첫 프로토타입을 선보였다. 이 로봇은 다리에 12자유도(Degrees of Freedom: 본래 통계학 용어로서 다른 변수와 무관하게 독립적으로 움직이는 변수를 가리킨다. 로봇에서는 하나의 방향으로 움직일 수 있는 축을 1개의 자유도라고 한다)를 탑재해 다양한 지형에서 보행이 가능했다.
2021년 유비테크는 자체 개발한 ‘워커 X’(Walker X)를 공개하며 기술력을 한층 끌어올렸다. 이 모델에는 시각 기반 위치 인식 내비게이션과 손과 눈의 협응 조작 기술이 적용돼 보다 자연스럽고 생동감 있는 상호작용이 가능해졌고, 체스 두기와 같은 복잡한 작업도 수행할 수 있게 됐다.
2022년 8월에는 샤오미가 자사의 휴머노이드 로봇 ‘사이버원’(CyberOne)을 공식 발표했고, 2023년 10월에는 샤오펑이 인간형 이족보행 로봇 ‘PX5’를, 이어 2024년 11월 6일에는 AI 기반 휴머노이드 로봇 ‘아이언’(Iron)을 연이어 공개하며 기술력을 과시했다. 이 외에도 화웨이(華爲) 등 IT 기업들도 적극적으로 이 분야에 뛰어들고 있다. 2023년 6월 19일, 화웨이기술유한공사(華爲技術有限公司)는 전액 출자 형태로 ‘둥관지무 로보틱스’(東莞極目機器有限公司)를 설립했으며 자본금은 8억 7천만 위안(1,812억 7천만원)에 달했다.
AI 시대의 도래와 함께 휴머노이드 로봇의 상업화가 빠르게 현실화되고 있다.하지만 연구개발 과정에서는 해결해야 할 기술적 과제가 적지 않다.
본체 개발의 4가지 난제
휴머노이드 로봇의 발전 경로가 상업화로 이어지고 있는 지금, 논의는 더 넓은 범주인 지능형 로봇으로 확장된다. 지능형 로봇은 AI를 탑재해 환경 인식·판단·학습·의사결정을 수행할 수 있는 로봇을 뜻하며, 산업용·서비스용·자율주행·의료 로봇 등 다양한 형태가 모두 포함된다. 휴머노이드 로봇은 이러한 지능형 로봇의 한 유형으로, 인간과 유사한 외형과 동작을 갖춘 특수한 형태일 뿐이다.
따라서 휴머노이드 로봇이 상업화 단계에 진입하더라도 지능형 로봇이라는 큰 틀에서 보면 여전히 본체 개발과 관련된 여러 기술적 과제가 남아 있다. 이러한 난제는 크게 네 가지로 나눌 수 있다.
첫째, 로봇의 ‘두뇌’인 지능 모델의 범용성이 아직 충분하지 않아 다양한 환경에 적응하기 어렵다. 이 지능 모델은 로봇의 성능 한계를 결정짓는 핵심 요소로, 여러 기업이 고성능 대형 AI 모델을 활용해 자사의 체화 지능(Embodied AI) 시스템을 개발하고 있다. 예를 들어 미국의 피겨(Figure)나 노르웨이의 1X 테크놀로지는 오픈AI의 대형 모델을 로봇에 접목해 실제 작업을 수행한 바 있다.
현재 대형 AI 모델이 완전히 성숙하지 않은 상황에서는 특정 작업 환경에 맞춘 수직형 모델을 병행해 활용하는 방식이 주목받고 있다. 수직형 모델은 물류, 의료, 제조 등 특정 분야에 맞춰 설계된 모델로, 범용 모델이 다루기 어려운 환경에서도 안정적으로 작동할 수 있다. 일부 기업들은 작업 환경을 제한된 영역으로 설계해 그 안에서 높은 성능을 확보하려는 시도를 하고 있다. 이렇게 하면 필요한 데이터 양을 줄일 수 있고 향후 대형 모델의 범용성이 높아질 경우 작업 범위를 더 넓게 확장하는 데 도움이 된다.
둘째, 체화 지능의 핵심은 데이터다. 체화 지능은 로봇이 실제 세계에서 눈(카메라), 귀(센서), 손(모터) 같은 하드웨어를 통해 환경과 상호작용하며 학습하는 지능을 말한다. 이를 위해 다양한 센서로 실시간 데이터를 수집하고, 그 데이터를 바탕으로 3차원 환경을 인식하거나 행동 궤적을 분석해 의사결정 알고리즘을 개선한다. 하지만 대형 모델이 요구하는 데이터는 방대하고 실제 환경에서 수집하기 어려운 경우가 많다. 기존의 VLA(비전-언어-행동) 모델도 인간 작업 영상이나 다양한 로봇 동작 데이터를 충분히 활용하기 어려워 현재는 시뮬레이션 데이터나 인터넷 기반 이미지·텍스트를 중심으로 학습이 이루어지고 있다.
셋째, 로봇의 구조 설계도 여전히 개선이 필요하다. 예를 들어, 2025년 4월 베이징 난하이즈 공원에서 열린 ‘2025 베이징 이좡(亦莊) 인간-로봇 하프마라톤’에서는 관절 설계, 열 관리, 배터리 성능, 제어 알고리즘 등 다양한 요소가 시험대에 올랐다. 경기 중 일부 로봇은 균형을 잃거나 과열로 인해 냉각액 분사가 필요했다.
현재 대부분의 휴머노이드 로봇은 배터리 지속시간이 2~5시간 수준으로 장시간 작업에는 한계가 있다. 특히 고속 동작이나 중량 작업 시 열 축적이 빠르고 인체 구조를 모방한 설계 특성상 내부 공간이 좁아 열 방출이 어려운 점도 해결 과제로 남아 있다.
넷째, 공급망 비용이 높아 하드웨어 가격 인하가 필요하다. 아직 양산 규모가 작아 부품 수급이 불안정하고 일부 부품은 적용 분야가 제한돼 가격이 높은 편이다. 정밀 센서나 로봇의 관절 구동부에 쓰이는 유성 롤러 스크루(planetary roller screw) 등이 대표적이다. 향후 원가 절감이 이루어지면, 이러한 기술적 난제들이 점차 해소되고 시장 확대 속도도 빨라질 것으로 기대된다.

인간과 가까워지고 있는 로봇 기술
현재 휴머노이드 로봇 분야는 제품의 빠른 세대 교체와 성능 향상이 지속적으로 이루어지고 있다. 제품별 기능 지표와 상업화 진척도에는 차이가 있지만 특정 기술 영역에서 두드러진 성과를 보이고 있다.
첫째는 운동 제어 능력이다. 최근 휴머노이드 로봇은 일정 수준의 복잡한 동작을 구현할 수 있을 정도로 발전했다. 예를 들어, 유니트리 로보틱스(Unitree Robotics)의 G1 모델은 자연스러운 사이드 플립(측공중회전)을 수행하고, 복싱 경기에서 타격을 받아도 빠르게 균형을 회복하는 등 뛰어난 운동 성능을 보여준다.
둘째는 환경 인지 능력이다. 라이다(LiDAR), 비전 센서, 관성측정장치(IMU) 등 다양한 센서를 결합한 ‘다중 모달 융합 기술’을 통해 지형 변화나 장애물을 실시간으로 감지하고, 보폭이나 중심축을 조정해 안정적으로 이동할 수 있다. 예를 들어, 노에틱스(NOETIX)가 개발한 N2 로봇은 바이오닉 발바닥 센서, 라이다, 비전 슬램(SLAM) 기술을 활용해 복잡한 지형에서도 자율적으로 길을 찾는다. 또한 외부 충격을 감지하고 대응하는 ‘동적 항간섭 알고리즘’을 적용해 돌발 상황에서도 안정적으로 움직이는 것이 가능하다.
셋째는 테슬라의 사례다. 테슬라는 2021년 AI 데이 행사에서 ‘테슬라 봇’(Tesla Bot)을 공개했다. 이 로봇은 인간 평균 체형에 가까운 외형을 갖췄고, 경량 소재로 제작됐으며 얼굴에는 정보를 표시하는 디스플레이가 탑재됐다. 또한 총 40개의 전기·기계식 액추에이터(구동 장치)가 적용되어 팔, 다리, 손, 목, 몸통의 정밀한 움직임을 구현한다. 특히 손은 인간의 섬세한 움직임을 모사할 수 있는 구조로 설계됐고 발에는 균형 유지와 힘 감지를 위한 센서가 탑재되어 민첩한 동작이 가능하다.
테슬라는 2023년 12월에 2세대 모델 ‘옵티머스 젠2’(Optimus Gen2)를 공개했다. 이 모델은 이전 버전보다 무게가 10kg 적고, 팔다리의 움직임도 한층 유연해졌다. 보행 속도는 30% 향상됐으며, 스쿼트 같은 복합 동작도 가능하다. 손가락에는 전체 촉각 센서를 적용해 달걀처럼 작고 깨지기 쉬운 물체도 정밀하게 다룰 수 있다.
아직 ‘옵티머스 젠3’(Optimus Gen3)는 공식 발표되지 않았지만 기존 행사에서 공개된 정보에 따르면 차세대 모델은 한 손에 22개의 자유도를 갖춘 고성능 로봇핸드를 탑재할 것으로 예상된다. 이는 인간 손처럼 섬세하고 정교한 작업 수행이 가능하다는 의미다.
중국 기업의 진입
중국 기업이 개발한 휴머노이드 로봇 가운데 대표적인 사례로는 로봇 에라(Robot Era)가 2024년 8월에 출시한 ‘싱둥 스타1’(星動 STAR1)이 꼽힌다.
이 로봇은 수차례의 개발 과정을 거쳐 완성된 고성능 모델로, 전신에 총 55개의 자유도를 갖추고 있어 업계 최고 수준의 동작 성능을 구현한다. 최대 관절 토크는 400Nm, 최대 회전 속도는 25rad/s에 달하며, 실외 환경에서의 주행 속도는 3.6m/s로 측정됐다. 여기에 3자유도를 갖춘 허리 구조가 더해져 자연스러운 보행, 달리기, 점프 등 복잡한 동작도 안정적으로 수행할 수 있다. 상체에는 로봇 에라가 자체 개발한 7자유도 고정밀 바이오닉 로봇 팔이 탑재되어 있으며, 고성능 정밀 조작용 손인 ‘싱둥 XHAND1’은 전 구동 방식(Full-actuated)의 12자유도를 갖추고 있어 섬세한 작업 수행이 가능하다. 이를 통해 다양한 산업 및 서비스 시나리오에 유연하게 대응할 수 있다.
싱둥 스타1은 인텔의 고성능 프로세서와 엔비디아의 로봇용 시스템 레벨 칩 ‘오린’(Orin)을 통합해, 강화학습·모방학습·엔드투엔드 방식의 대형 AI 모델 연구에 필요한 연산 자원을 제공한다. 또한 지문 배열식 촉각 센서, 심도 카메라, 마이크 어레이, 얼굴 인터랙션 디스플레이 등 다양한 외부 장치를 탑재해 인간과의 상호작용 능력도 강화했다.
기술 발전은 실제 활용 단계에서도 가시화되고 있다. 현재 휴머노이드 로봇은 연구·교육, 스마트 안내, 데이터 수집뿐 아니라 용접·분류·물류 운반 등 산업 현장에서 점차 활용도가 높아지고 있다. 더불어 노인 돌봄, 재활, 가정 서비스 등 소비자 대상 서비스 분야도 주요 확장 영역으로 주목받고 있다.
최근에는 본격적인 대량 발주 사례도 등장하고 있다. 예를 들어, 애지봇과 유니트리 로보틱스는 중이정보기술(中移(杭州)信息技術有限公司)이 발주한 2025~2027년 휴머노이드 이족 로봇 OEM 프로젝트를 수주했다. 총 계약 규모는 1억 2,400만 위안이며, 이 중 애지봇이 7,800만 위안, 유니트리 로보틱스가 4,605만 위안을 차지했다. 이러한 대규모 발주는 중국 휴머노이드 로봇 산업이 실제 산업 환경에 본격 진입해 응용 시장이 탐색 단계를 넘어 초기 상용화 단계로 접어들고 있음을 보여준다.
실행 시스템과 핵심 부품
휴머노이드 로봇은 인간과의 상호작용, 환경 인식, 운동 제어라는 세 가지 핵심 기능을 갖추고 있으며, 이 가운데 실행 시스템은 로봇의 동작을 구현하는 핵심 기술로, 다양한 정밀 부품과 직결된다.
① 실행 시스템
실행 시스템은 크게 몸통 관절 모듈과 덱스터러스 핸드(섬세 조작용 손)로 구성된다. 관절은 회전형과 선형형으로 나뉘며, 회전형은 ‘모터 + 감속기’, 선형형은 ‘모터 + 볼스크루’ 방식이 일반적이다.
테슬라와 샤오펑(小鵬)은 회전과 선형 관절을 조합한 구조를 채택하고 있으며, 피겨(Figure), 애지봇(智元机器人), 유니트리 로보틱스 등은 전(全)회전 관절 방식도 활용하고 있다.
테슬라의 옵티머스(Optimus)는 총 40개의 액추에이터를 탑재하고 있으며, 이 중 28개는 회전형과 선형형으로 나뉘어 몸통, 팔, 다리의 움직임을 제어한다. 손에는 12개의 액추에이터가 적용되어 정밀한 조작이 가능하다. 특히 3세대 옵티머스의 덱스터러스 핸드는 손가락마다 최대 5개의 자유도를 갖추고 있으며, 새끼손가락에 회전축과 대립관절(opposition joint)을 추가해 자율 파지(grasping) 능력과 손 내부 조작 성능을 크게 향상시켰다.
중국 기업들도 핵심 부품 개발에 박차를 가하고 있다. 특히 덱스터러스 핸드 분야에서는 2024년 하반기 이후 인스로보틱스(因时机器人), 자오웨이기전(兆威机电), 파시니(帕西尼), 레이사이즈넝(雷赛智能), 융촹즈넝(永创智能), 수텅쥐촹(速腾聚创), 장쑤레이리(江苏雷利) 등 다수의 기업이 신제품을 출시하며 기술 경쟁이 치열해지고 있다. 이로 인해 가격대가 다양해지고, 적용 분야도 산업용부터 서비스용까지 확대되고 있어 중국 휴머노이드 로봇 산업의 핵심 부품 국산화와 상용화에 속도가 붙고 있다.
② 구동력 제공하는 모터
휴머노이드 로봇의 모든 동작은 모터를 통해 이루어진다. 모터는 기능에 따라 구동 모터와 제어 모터로 나뉜다. 이 중 서보 모터와 스테핑 모터는 대표적인 제어용 모터다. 특히 서보 모터는 정밀한 제어가 가능해 휴머노이드 로봇의 섬세한 동작 구현에 적합하다. 휴머노이드 로봇에 사용되는 모터는 다음 세 가지 조건을 충족해야 한다.
첫째는 고효율이다. 배터리로 작동하는 로봇은 잦은 회전 방향 전환과 가감속 동작을 반복하며, 순간적인 과부하도 견뎌야 한다. 따라서 에너지 소비가 적고 마찰 손실이 낮아야 한다.
둘째는 고속 응답성이다. 제어 신호에 빠르게 반응해 목표 동작을 수행해야 하며, 전체 구동계의 관성은 가능한 낮게 유지되어야 한다.
셋째는 고출력 밀도로, 고속·고토크 성능을 갖추면서도 소형·경량 구조를 유지해야 한다.
이러한 조건을 고려하면 휴머노이드 로봇에는 제어 중심의 서보 모터가 핵심이 될 가능성이 높고, 특히 정밀 제어가 필요한 관절이나 손 부위에서 활용도가 높다. 테슬라의 옵티머스 젠2(Gen2)에는 두 종류의 특수 서보 모터가 사용된다.
먼저 프레임리스 토크 모터로, 이 모터는 고집적도, 고효율, 고속, 저소음, 안정성, 저유지보수 등의 특징을 갖고 있으며, 로터와 스테이터가 독립된 구조로 설계된다. 여기에 안전 브레이크와 엔코더를 결합해 모듈화할 수 있다.
둘째는 코어리스 모터다. 특수 구조의 직류 모터로, 고감도·고효율·정밀 제어에 적합하며, 작동 안정성이 뛰어나다.
③ 모터 위치와 속도를 측정하는 엔코더
엔코더는 정밀한 동작 제어를 위한 핵심 센서로, 모터가 어느 방향으로 얼마나 회전했는지를 실시간으로 파악해 제어 시스템에 피드백을 제공한다. 비용 측면에서 보면, 엔코더는 서보 시스템 전체 비용의 약 11% 정도만 차지하지만, 위치 정확도, 속도 안정성, 에너지 효율, 안전성 등 로봇의 핵심 성능에 직결되는 중요한 역할을 한다.
④ 동력을 전달하는 감속기
감속기는 동력을 정밀하게 전달하는 핵심 기계장치로 휴머노이드 로봇의 동작안정성과 정밀성에서 빠질 수 없는 부품이다. 휴머노이드 로봇에 주로 사용되는 감속기 유형은 소형 경량화에 유리한 하모닉 감속기, 고토크 전달에 적합하고 내구성이 높은 정밀 유성 감속기, 충격 하중에 강해 산업용 로봇에 널리 쓰이는 RV 감속기가 있다.
⑤ 회전체를 지지하는 베어링
로봇의 부드러운 회전을 가능하게 하는 부품은 베어링이다. 베어링은 크게 회전 베어링과 슬라이딩 베어링으로 나뉜다. 이 중에서도 정밀 회전 베어링은 휴머노이드 로봇의 구동 시스템에서 핵심적인 역할을 한다. 감속기의 하중을 견디고, 회전 정밀도와 반복 위치 제어의 정확성을 높이며, 전체 시스템의 안정적인 작동을 뒷받침한다. 로봇에 사용되는 베어링은 좁은 공간에 설치되어야 하므로 작고 가벼워야 한다.
⑥ 인체 근육 기능을 구현하는 리드 스크루
모터의 회전 운동을 직선 운동으로 바꿔주는 장치로 리드 스크루가 있다. 리드 스크루는 관절과 팔다리 움직임을 구현하는 부품이다. 일반적으로 ‘볼 스크루 또는 롤러 스크루+회전 모터’ 조합이 널리 사용된다.
산업용 설비에서는 주로 효율이 높고 대량 생산에 적합한 볼 스크루가 사용되고 충격 하중에 강한 롤러 스크루는 휴머노이드 로봇에 더 적합하다. 특히 유성 롤러 스크루는 여러 개의 나사형 롤러가 메인 스크루를 감싸며 유성 기어처럼 움직이는 구조로 빠른 직선 운동이 가능하고 소음과 진동이 적다.
휴머노이드 로봇의 선형 액추에이터는 일반적으로 ‘모터+유성 롤러 스크루+베어링+센서’로 구성된다. 이 중에서도 역방향 유성 롤러 스크루는 고하중·고정밀 동작을 구현하는 데 유리하다. 이러한 구조는 인간의 근육 기능을 모사해 로봇이 보다 자연스럽고 안정적으로 움직일 수 있도록 돕는다.
액추에이터와 센서가 경쟁의 핵심
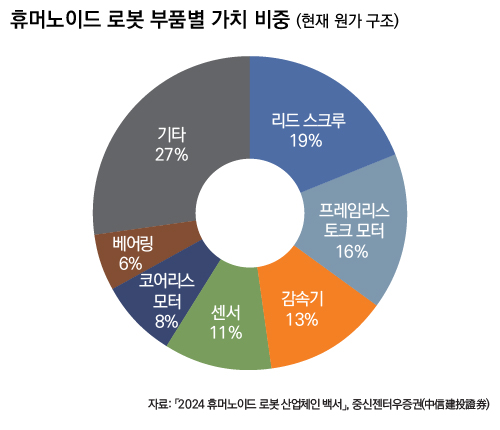
휴머노이드 로봇의 원가를 살펴보면 어떤 부품이 가장 큰 가치를 가졌는지 알 수 있다.
로봇의 관절이나 손가락을 실제로 움직이게 하는 구동 장치인 액추에이터(선형·회전·덱스터러스 핸드)가 전체 비용에서 무려 73%를 차지하며 핵심 비중을 담당한다. 액추에이터는 단일 부품이 아니라 모터·감속기·리드 스크루·베어링·센서 등 여러 정밀 부품이 결합된 구동 모듈로 구성된다. 주요 부품별 원가 비중을 보면 리드 스크루가 19%로 가장 크고, 이어서 프레임리스 토크 모터(16%), 감속기(13%), 센서(11%), 코어리스 모터(8%) 순으로 나타난다.
관절 모듈에서는 선형 액추에이터와 회전 액추에이터 중 어떤 방식을 선택할 지가 중요한데, 하중·비용·정밀도 등이 고려 요소다. 신소재나 자기구동 같은 새로운 기술이 등장하면서 선택지는 계속 바뀌고 있다. 다만 선형 관절은 고정밀·고하중·고효율의 강점을 지니고 있어 중국산 리드 스크루 업체들의 원가절감 흐름과 맞물려 앞으로 비중이 더 커질 가능성이 높다.
덱스터러스 핸드와 센서는 휴머노이드 로봇뿐 아니라 다양한 산업에서도 활용될 수 있다. 특히 덱스터러스 핸드는 로봇이 외부와 상호작용하는 핵심 부품으로, 테슬라의 양산 계획 발표 이후 수요가 본격적으로 늘어날 전망이다. 이에 따라 소형 리드 스크루, 텐던 로프 모듈, 각종 센서의 수요도 함께 급증할 것이다. 더 나아가 덱스터러스 핸드는 기존 전동 그리퍼를 대체할 수 있어 장기적으로 시장 규모가 크게 확대될 여지가 있다.
특히 센서는 휴머노이드 로봇을 포함한 체화 지능(Embodied AI) 시스템이 실제 환경과 상호작용하는 핵심 요소다. 시각 센서는 기술적으로 안정적이고 상용화가 활발한 반면, 힘·토크 센서는 원가 절감 단계에 있어 제조 공정 개선이 관건이다.
촉각 센서는 아직 기술 표준화가 진행 중이지만 활용 분야가 빠르게 확대되고 더 정밀한 감지가 요구되면서 체화지능을 한 단계 발전시키는 기술로 자리 잡고 있다.
산업 발전의 핵심 흐름은 공급망 비용 절감이다. 테슬라가 제시한 장기 단가 목표와 중국산 로봇 가격을 고려하면 완제품 가격은 8만 위안 이하까지 내려갈 수 있다. 이는 양산 단계가 진행될수록 부품 단가가 급격히 떨어진다는 의미다.
실제로 산업체인은 양산 전 단계(부품 단가가 시장가 기준), 초기 양산 단계(공정 개선으로 단가 하락), 대량 양산 단계(규모의 경제로 가격 안정)로 구분된다. 이런 과정을 거치면 대부분의 부품 단가는 1천 위안 이하로 수렴하게 되고 결과적으로 시장 규모는 폭발적으로 확대될 것이다.

쉬광탄 중신젠터우증권 애널리스트